
Contrôler un servomoteur en lui donnant un angle
Brancher un servomoteur et lui faire prendre un angle bien précis (ici par exemple 90°). Dans cet exemple l'angle est choisit et définit directement dans le code, le programme.
I. Matériel nécessaire



1 carte Arduino et son câble
3 jumpers / câbles
1 servomoteur
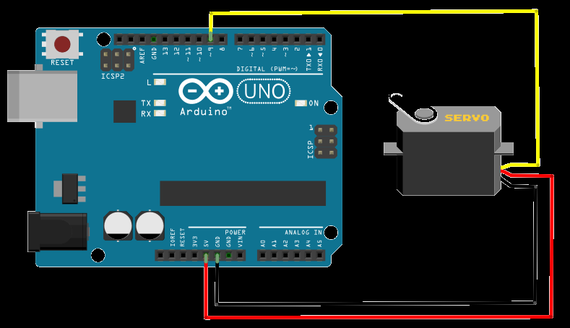
II. Visualisation du montage sur Fritzing
Notes de montage : Le servomoteur se branche lui sur la PIN 5V, la PIN Gnd et la PIN 9 de l’Arduino.
III. Code / Programme avec Arduino IDE

ce programme et ses explications sont disponibles en téléchargement ici : sur Mega.
IV. Autre programme : le Sweep
Le mouvement du servomoteur pour se rendre à l'angle sélectionné, peut être un peu saccadé, voir brutale. Il existe alors un code nommé Sweep permettant de faire bouger le servomoteur de façon plus fluide, grâce à l'utilisation d'une boucle "for".

Sources :
Rappel :

les images présentent appartiennent au Domaine public et sont l’œuvre de Peggy_Marco sur le site Pixabay : https://pixabay.com/fr/users/Peggy_Marco-1553824/ ou proviennent du projet Fritzing : http://fritzing.org/home/